Terrifying. This is my face when I’m terrified.

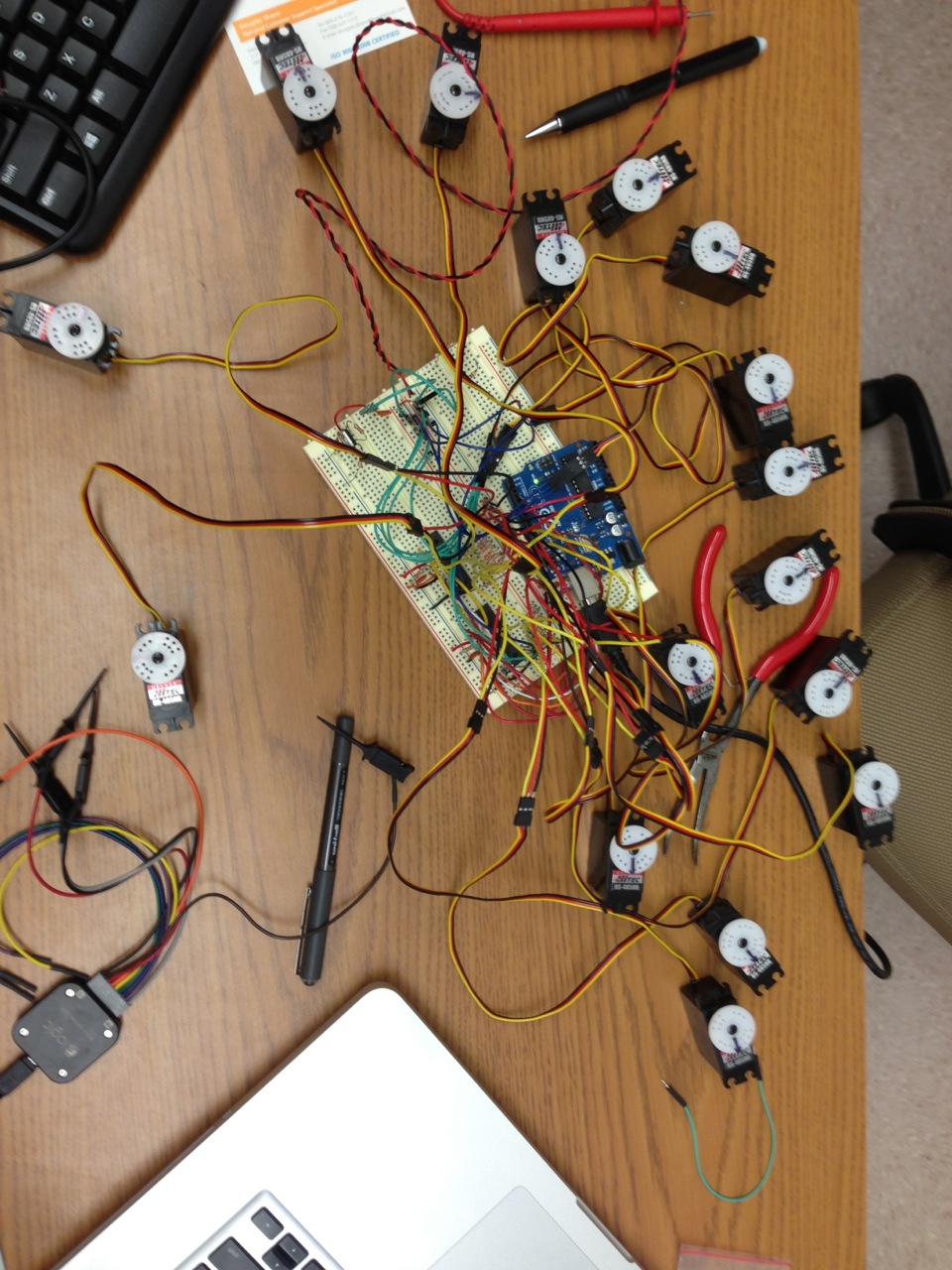
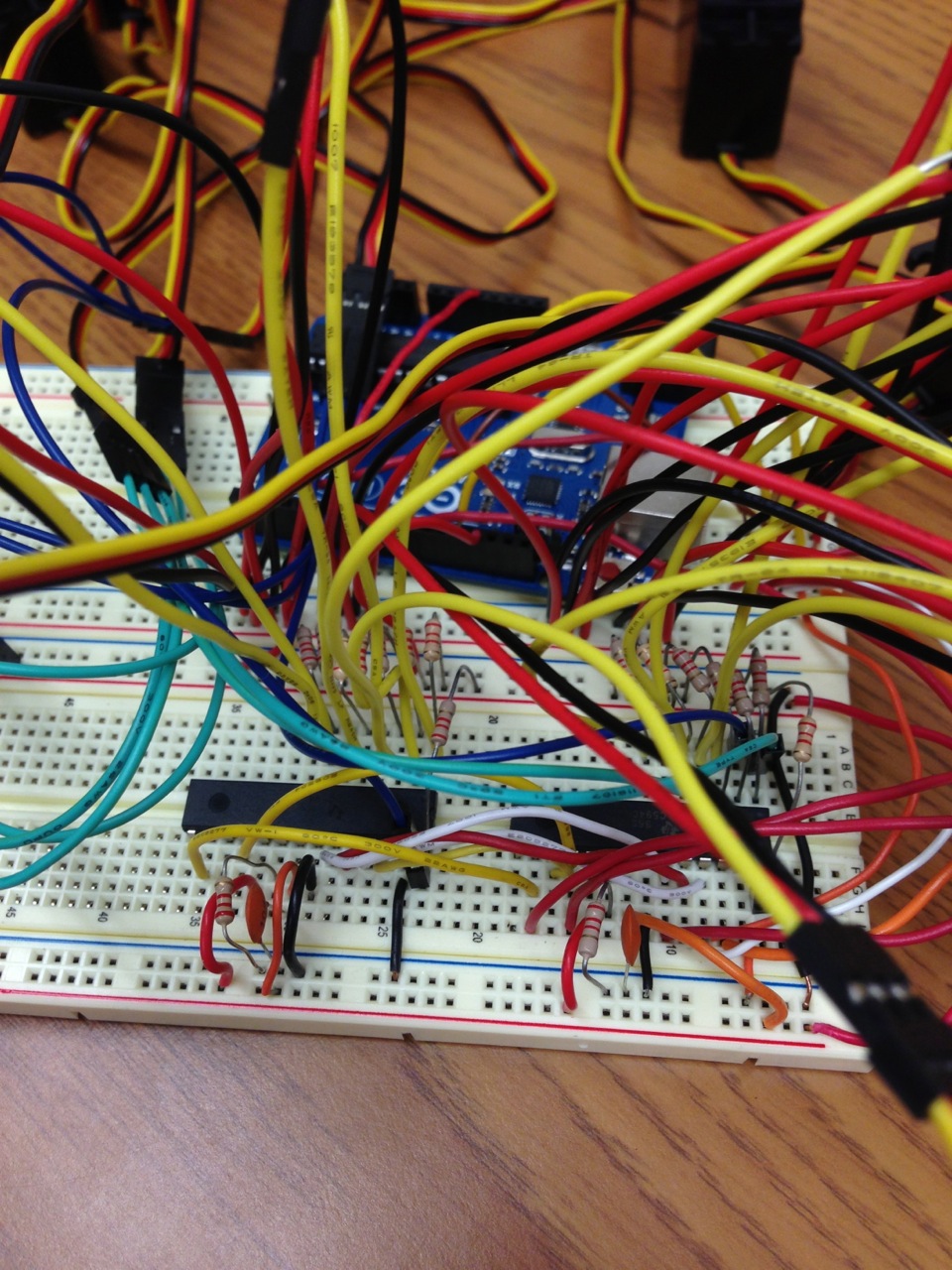
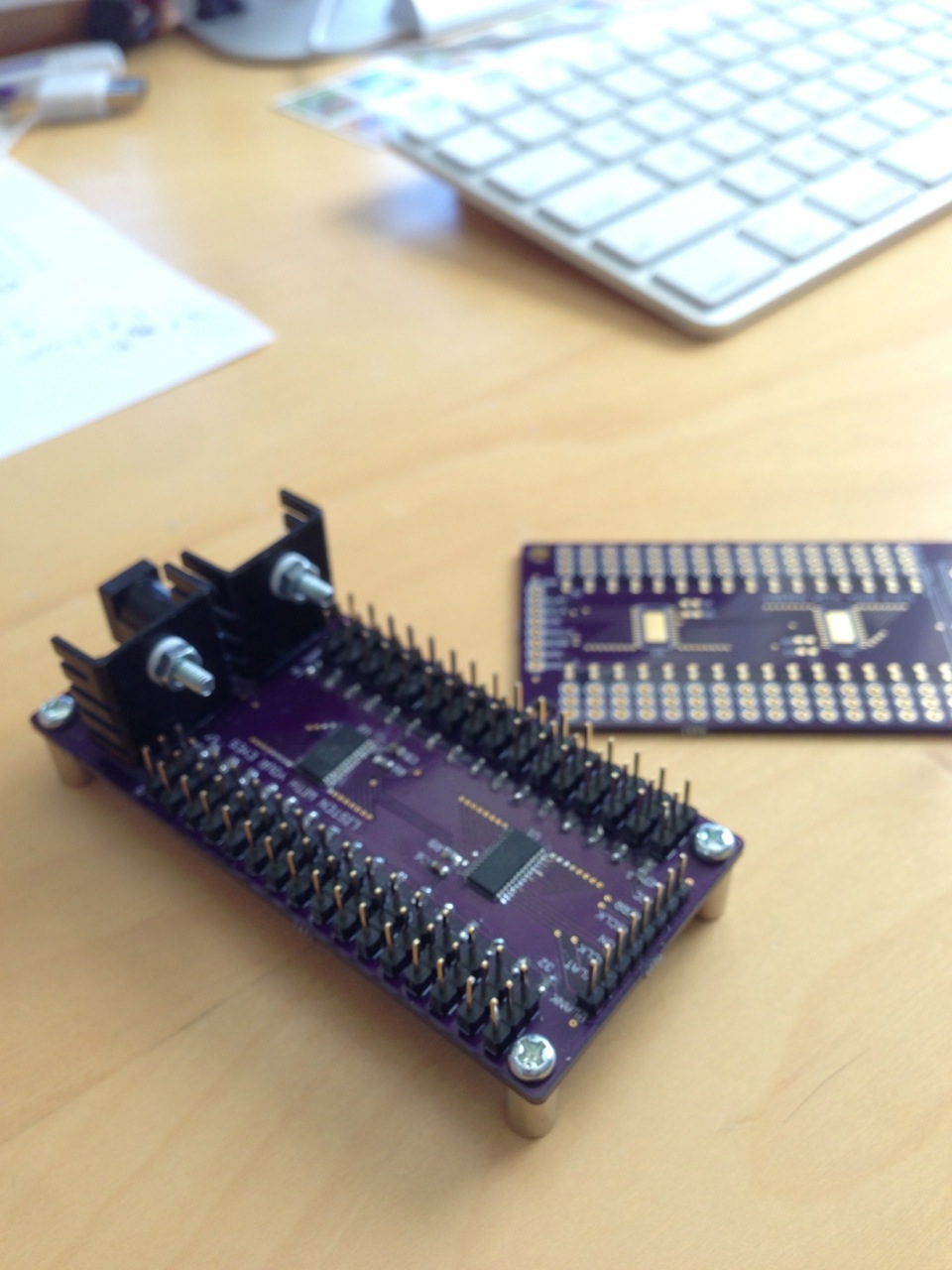
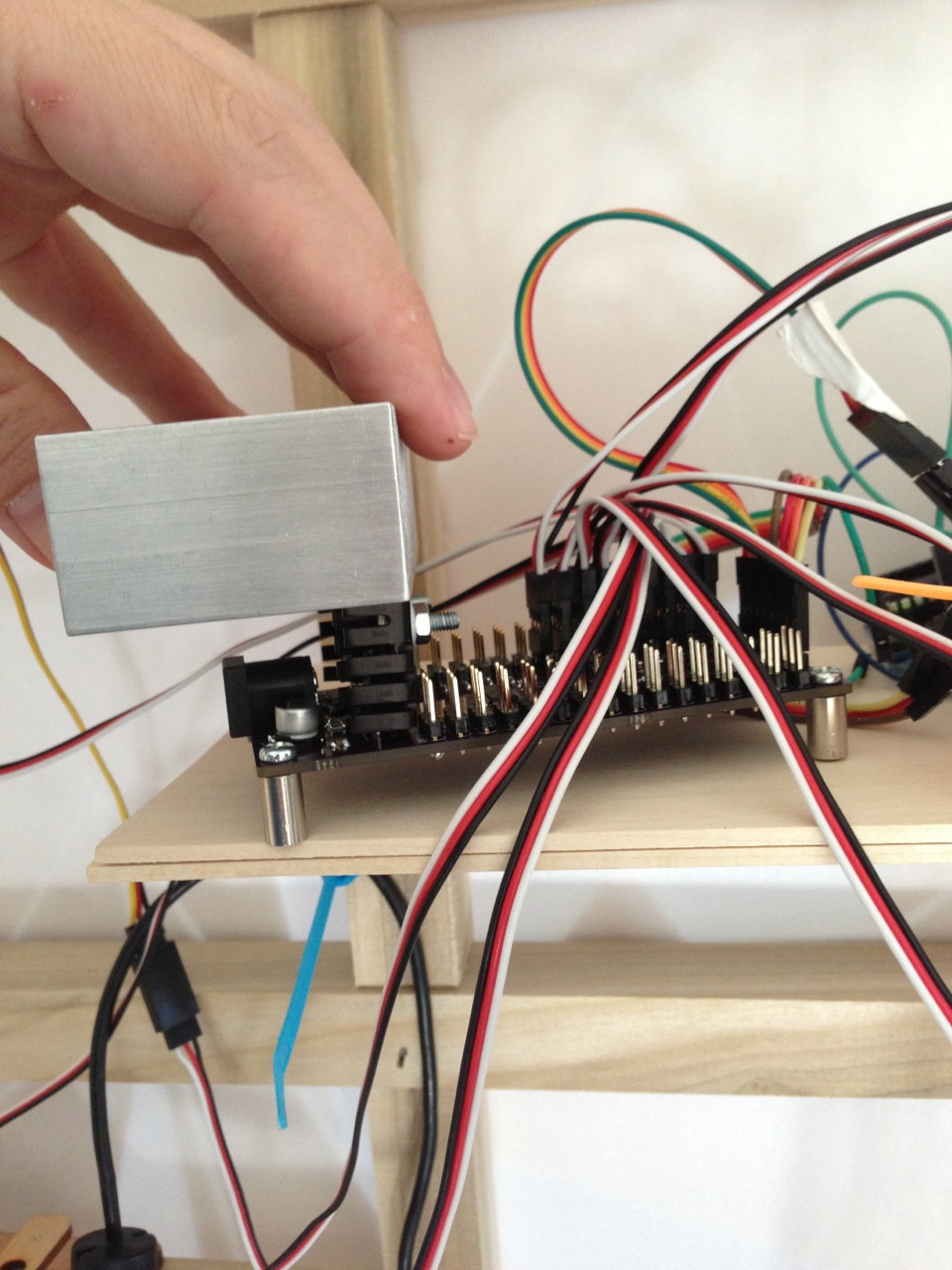
What I learned: electronics with moving parts get very hot, when they get hot they function more poorly, when they function poorly weird inconsistent things happen with movement. After much debugging and trial and error I added a hefty heat sync (attached with an awesome product: Arctic Silver Thermal Adhesive), and eventually I added a small fan as well. This seemed to eliminate many of the “strange” issues with inconsistent movements.
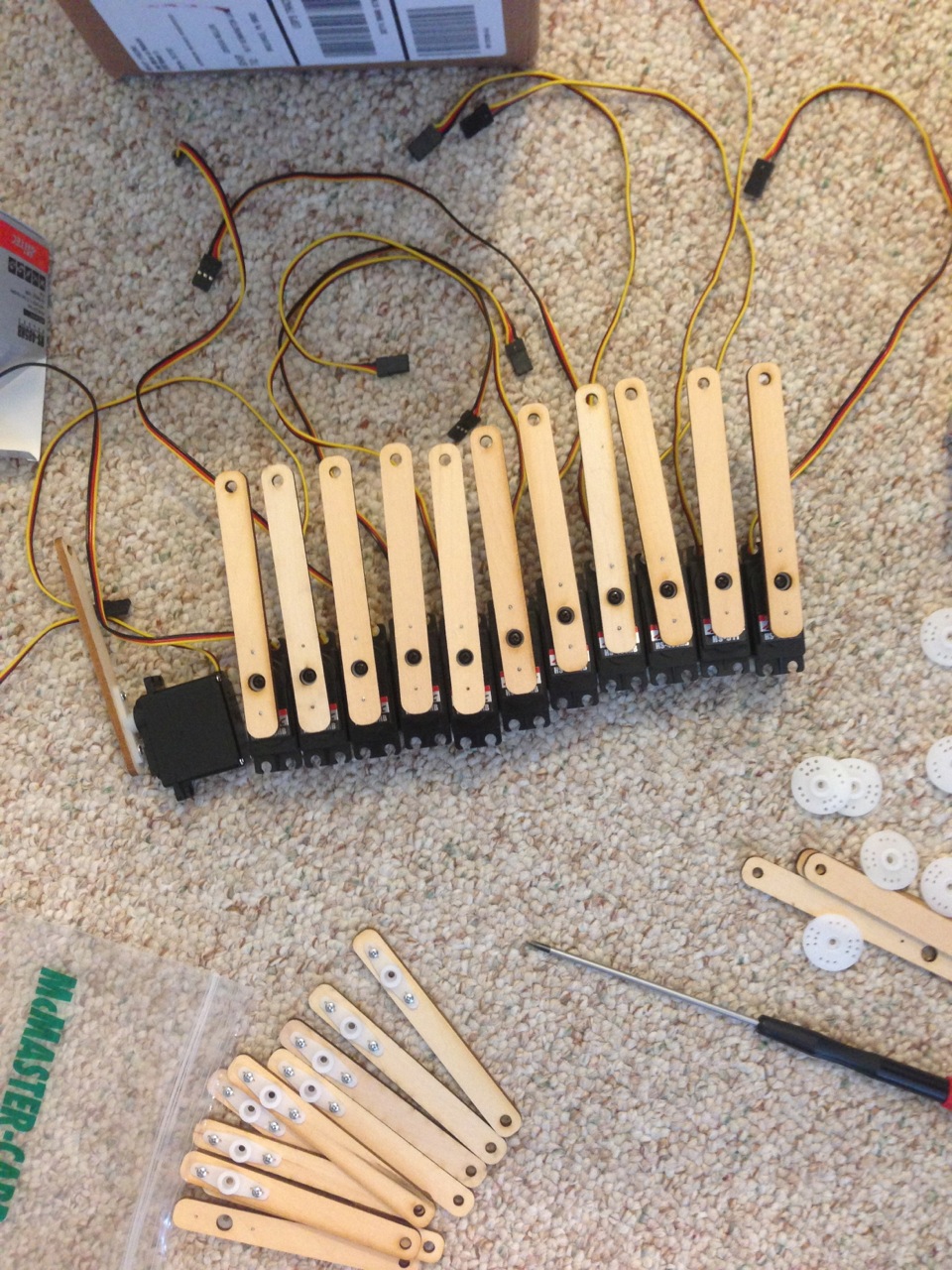
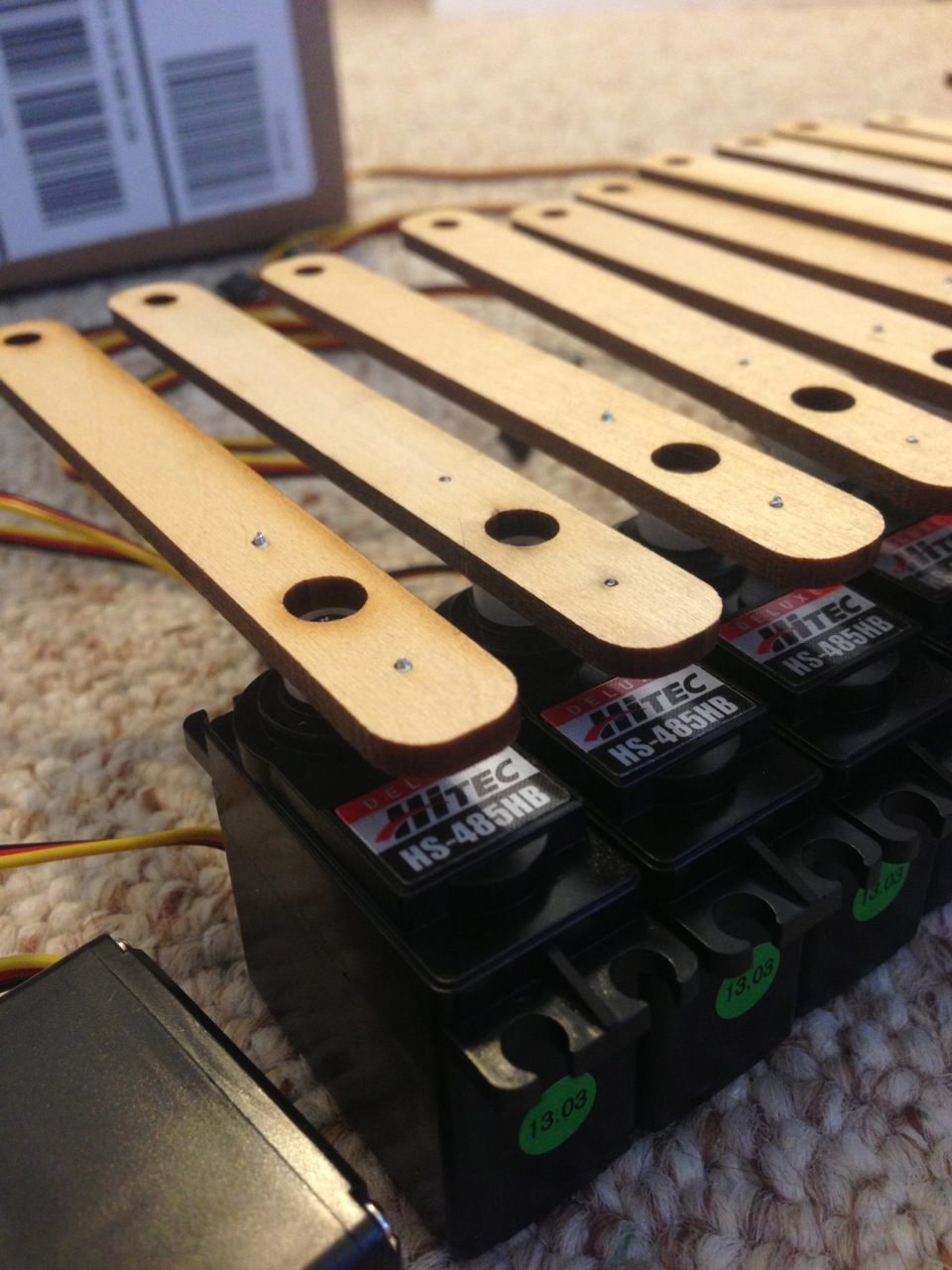
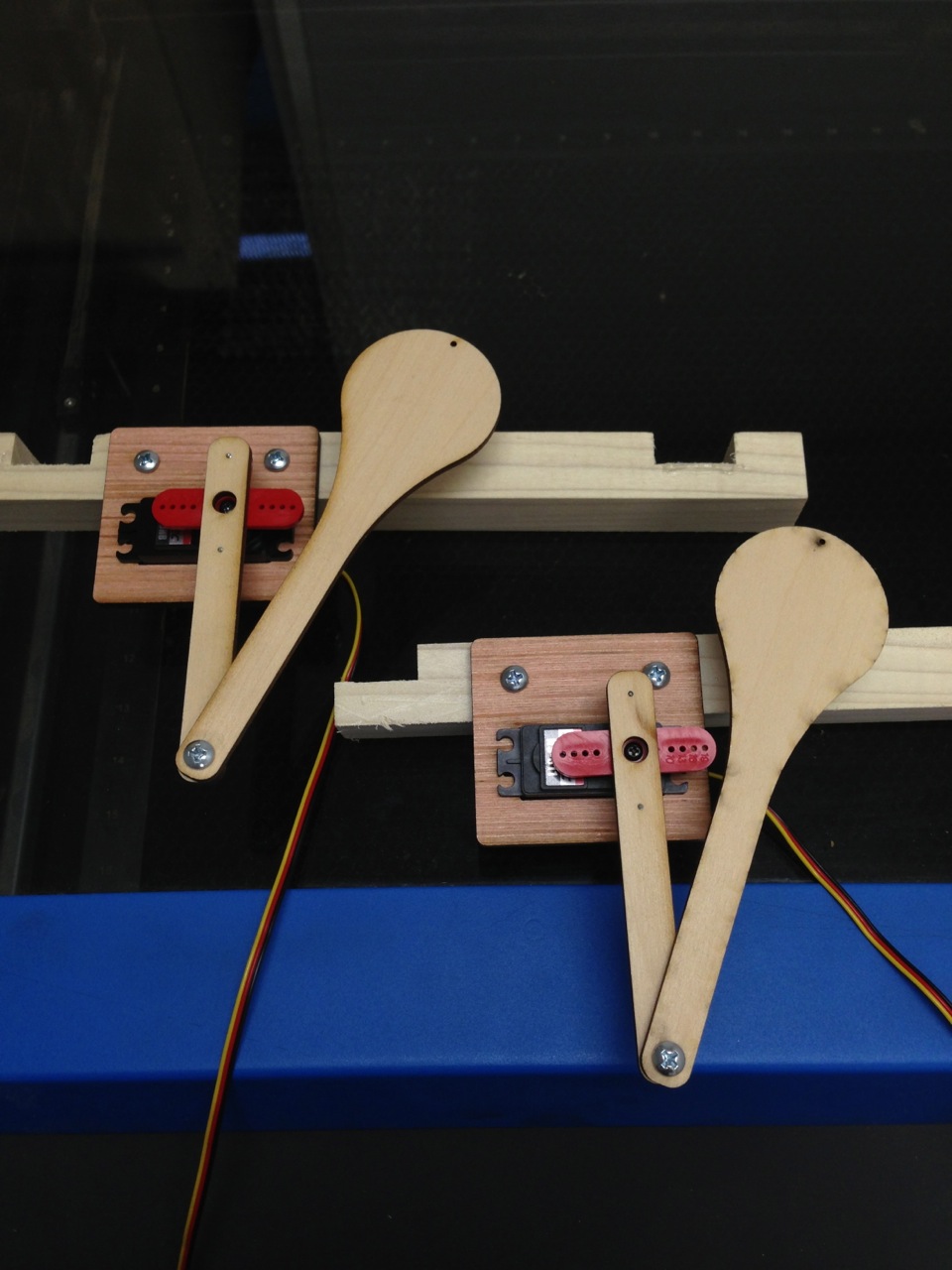
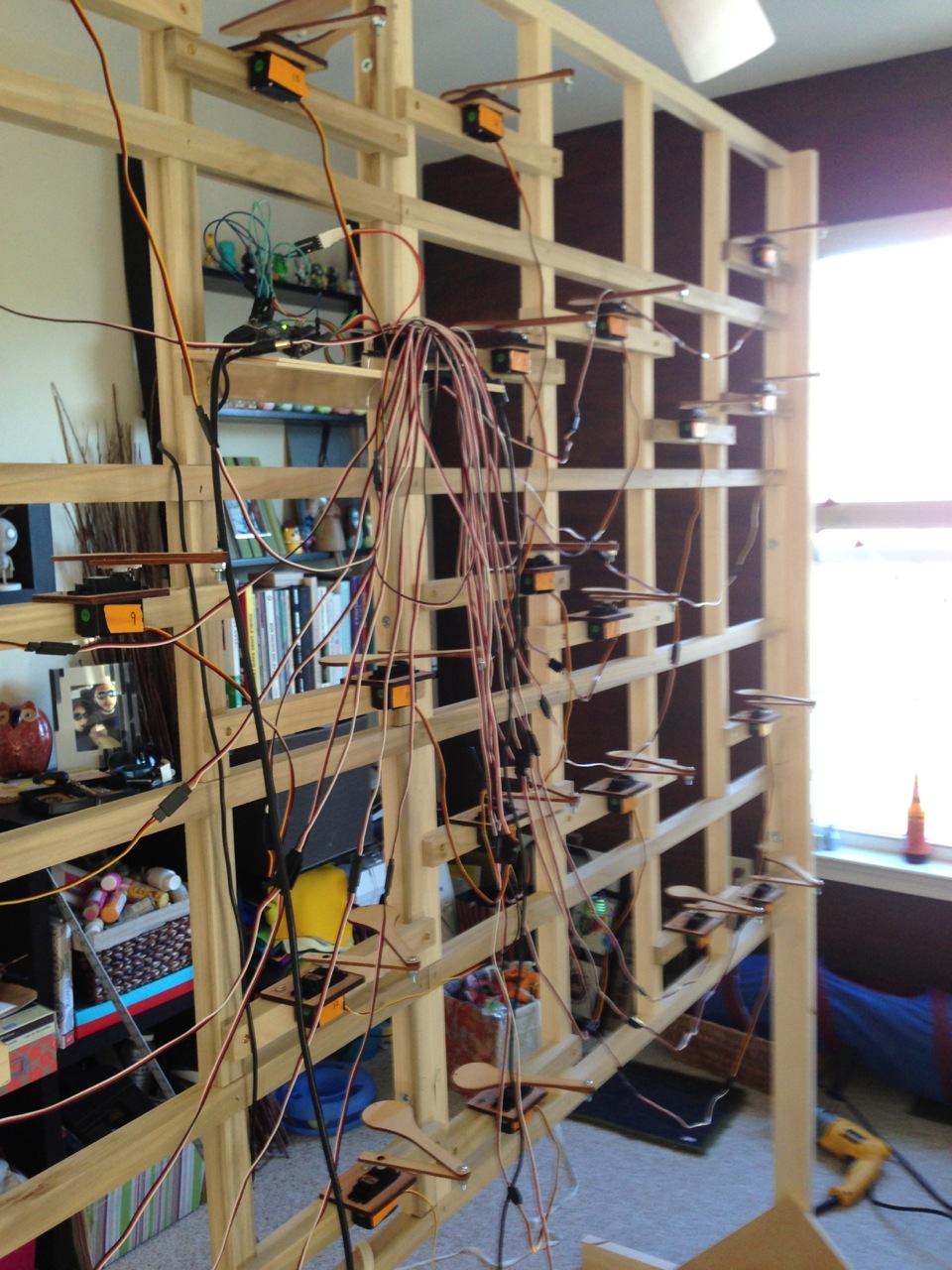
Half of the servos in the frame before the screen was installed:
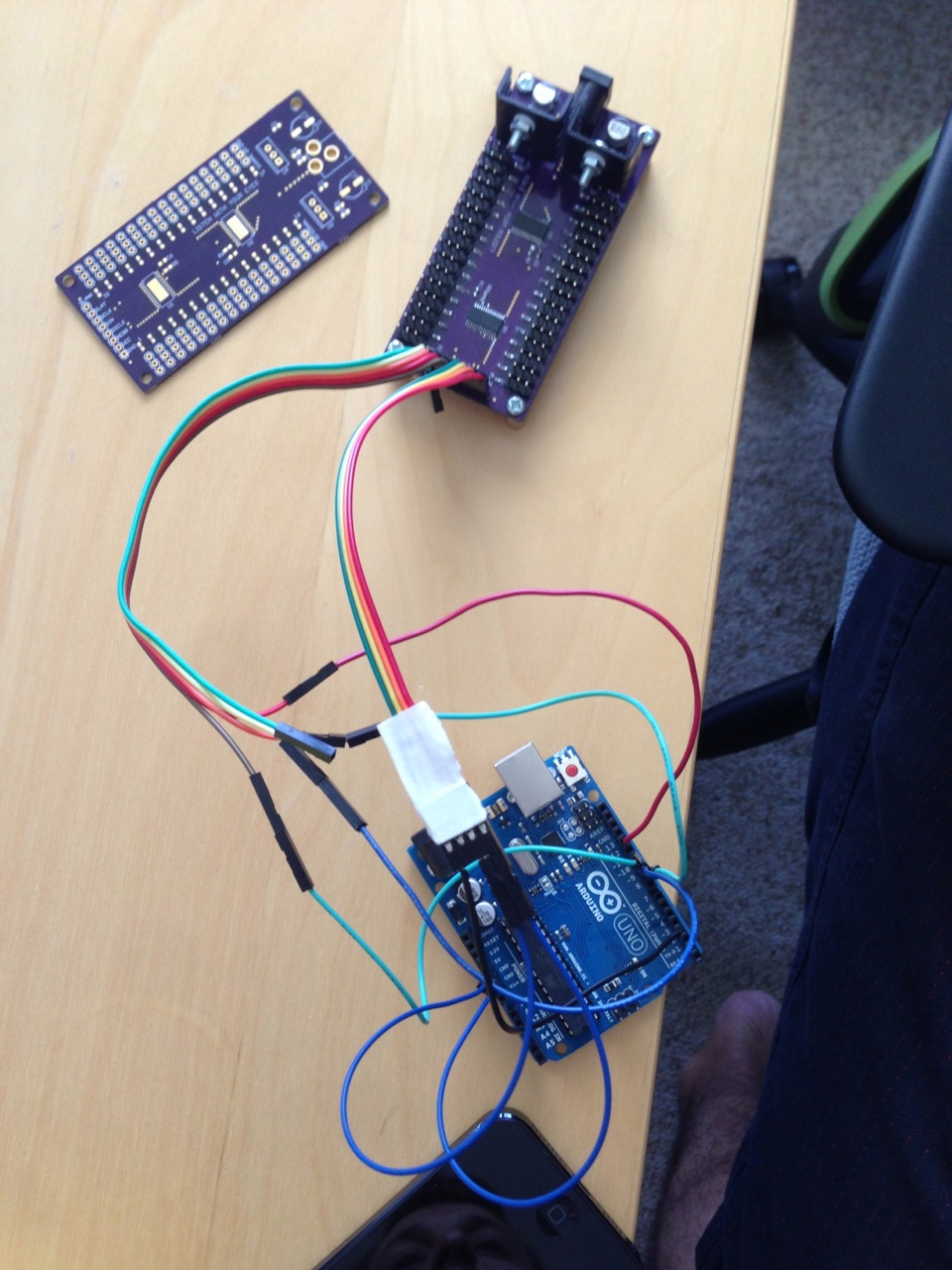
Oh, by the way, it worked: