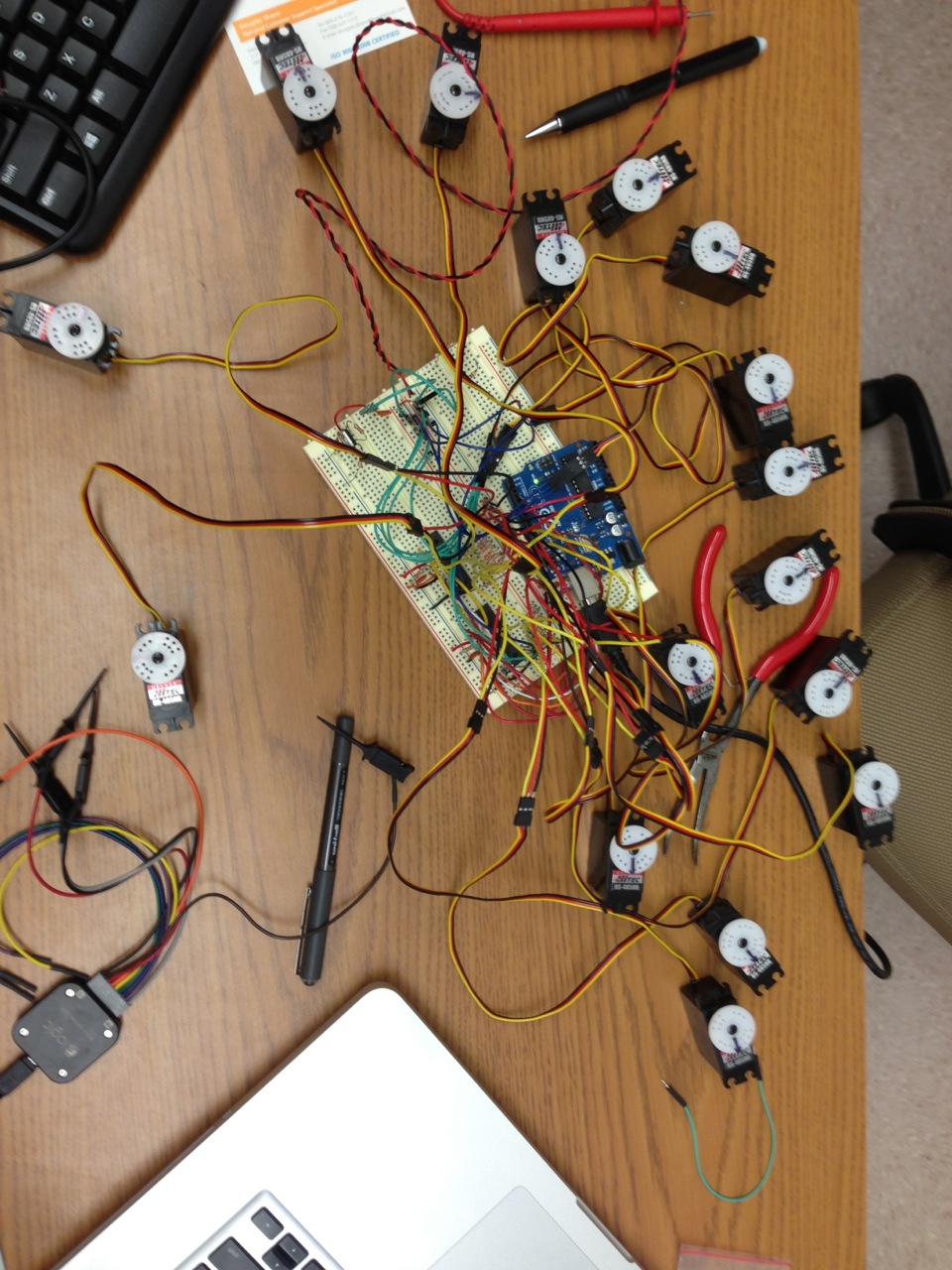
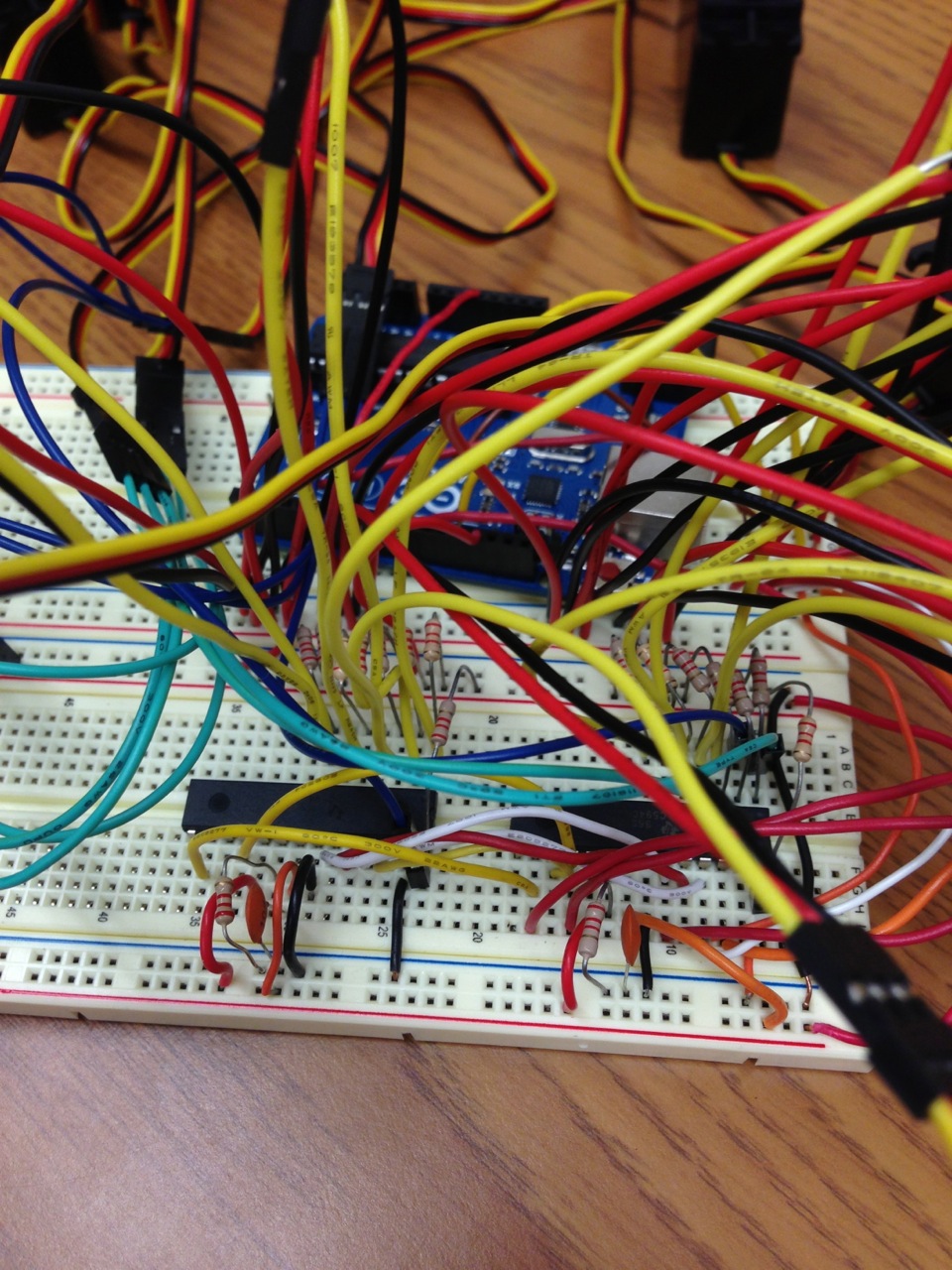
With the screen and servo attachments figured out, the next step was to figure out how to control (and power!) more than 2 servos. My buddy Ryan is an electrical genius (he’s getting a PHd in Chips, and seems to not have a website), so he said he’d help with a servo controller. The first step was to prototype on a breadboard connected to an arduino and control the servos via tlc5940arduino, an arduino library for the TI TLC5940 16-Channel PWM chip.

A video of the servos running:
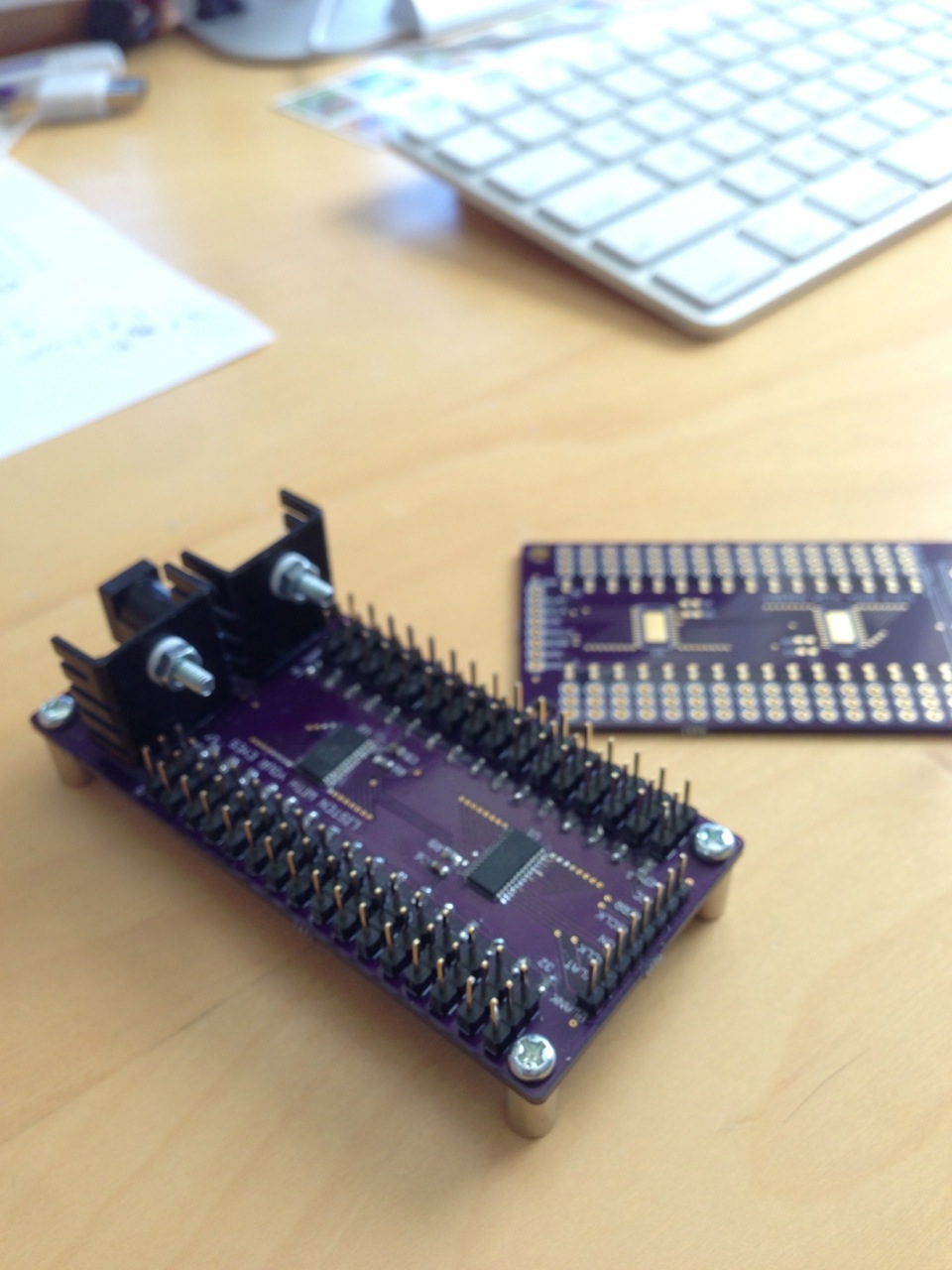
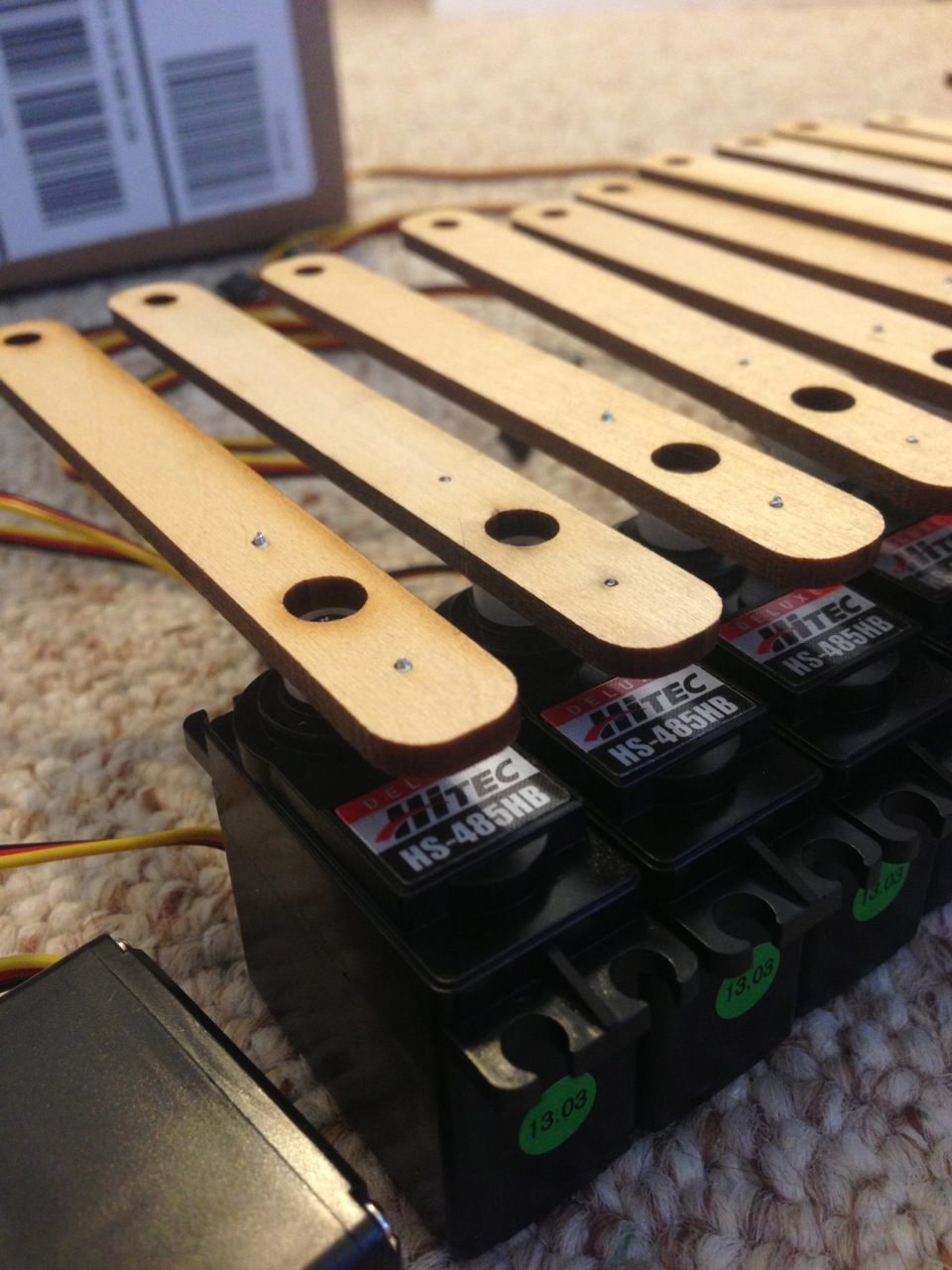
At this point I had moved up to the Hitec HS-485HB’s because I needed a bit more power to push the projection screen. And we realized that the servos used more power than what was listed on the data sheet, and consequently they need a larger heat sync and a beefier power supply. More on this later, but we were able to get the servos moving in isolation, so that’s a step forward.
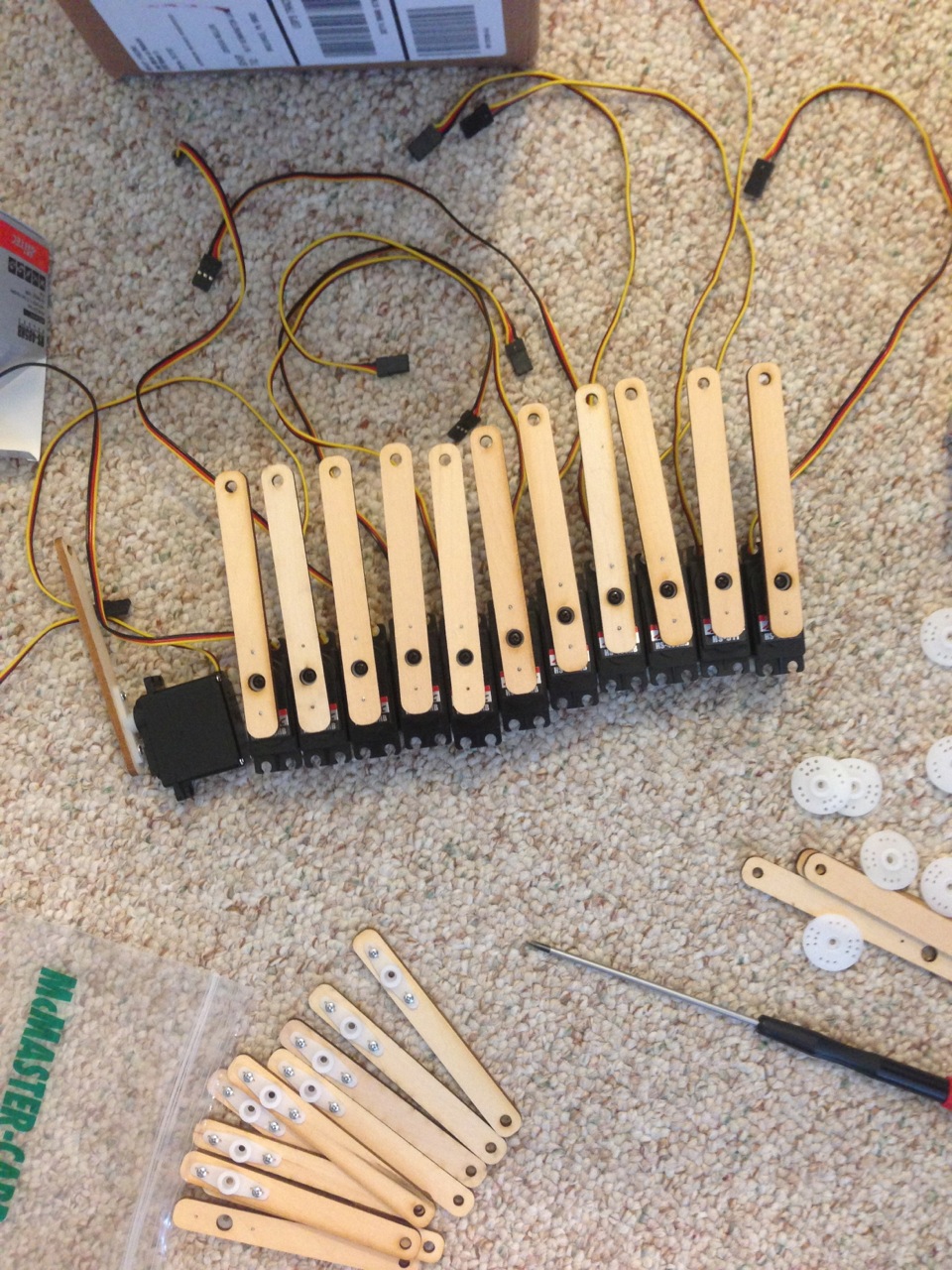
The next step in the process was to build the servo arm with the laser cut servo arms


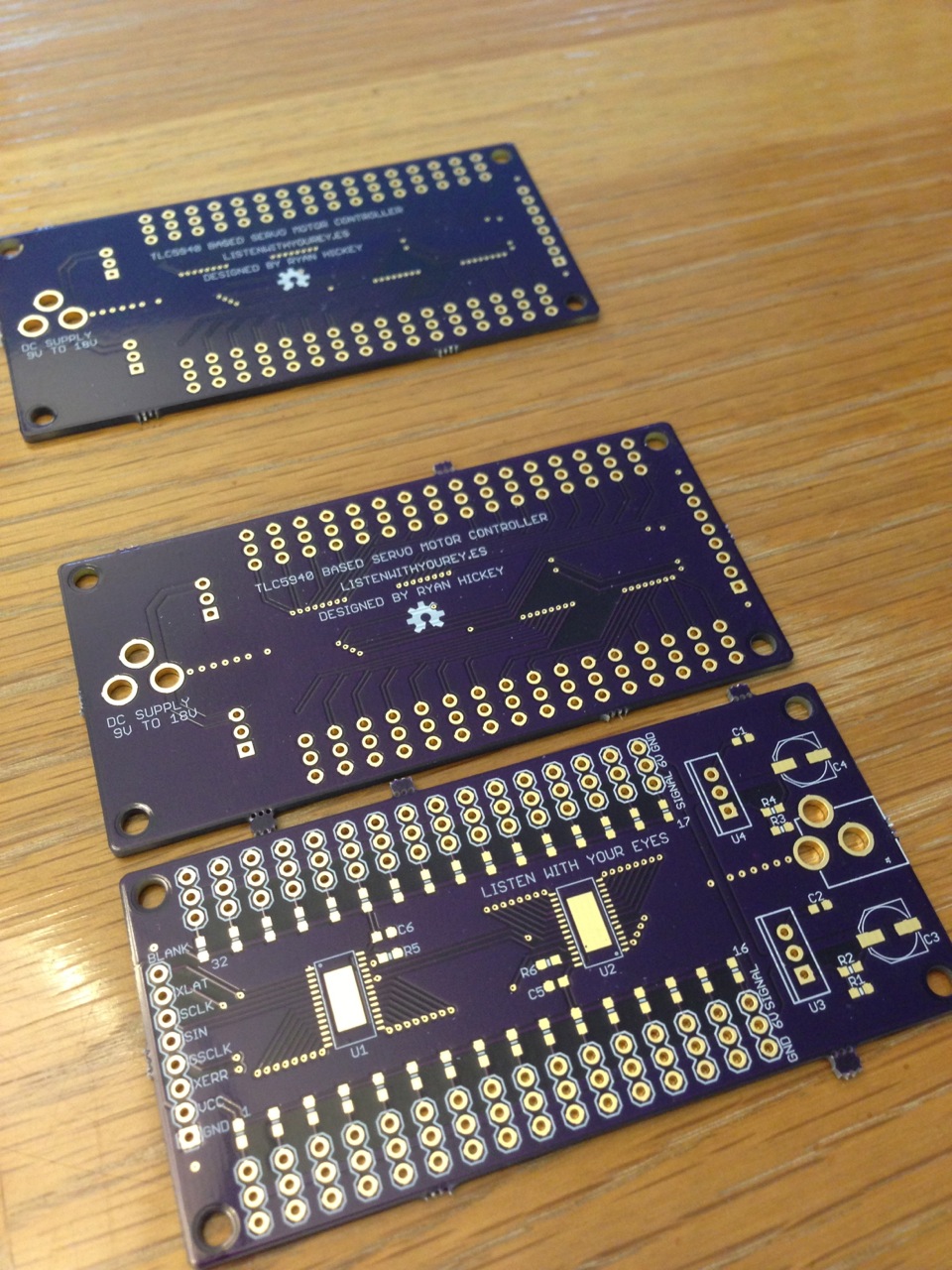
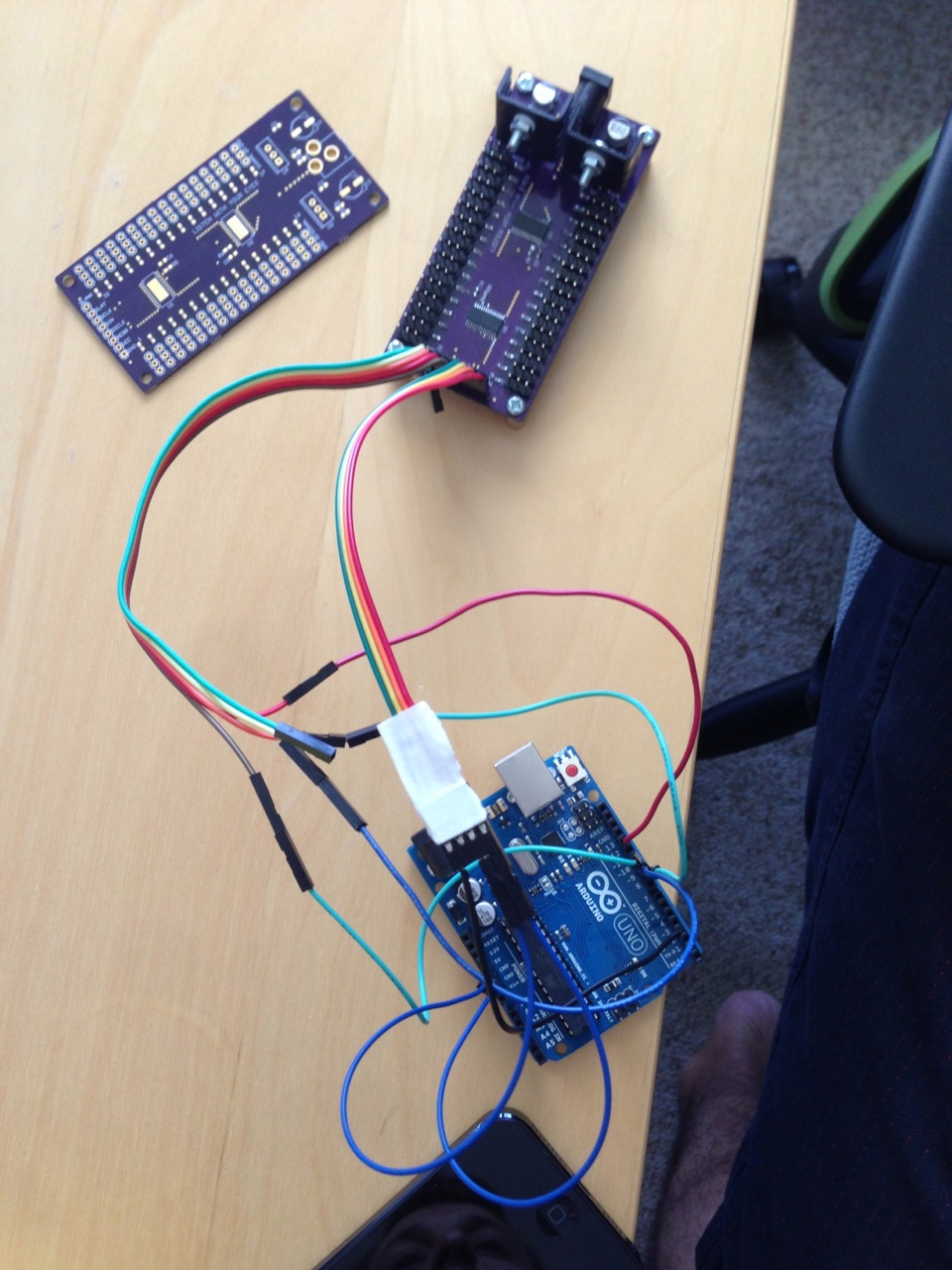
Eventually we moved off the breadboard to a custom controller than Ryan engineered, which would power and control the servos just as the breadboard did.