
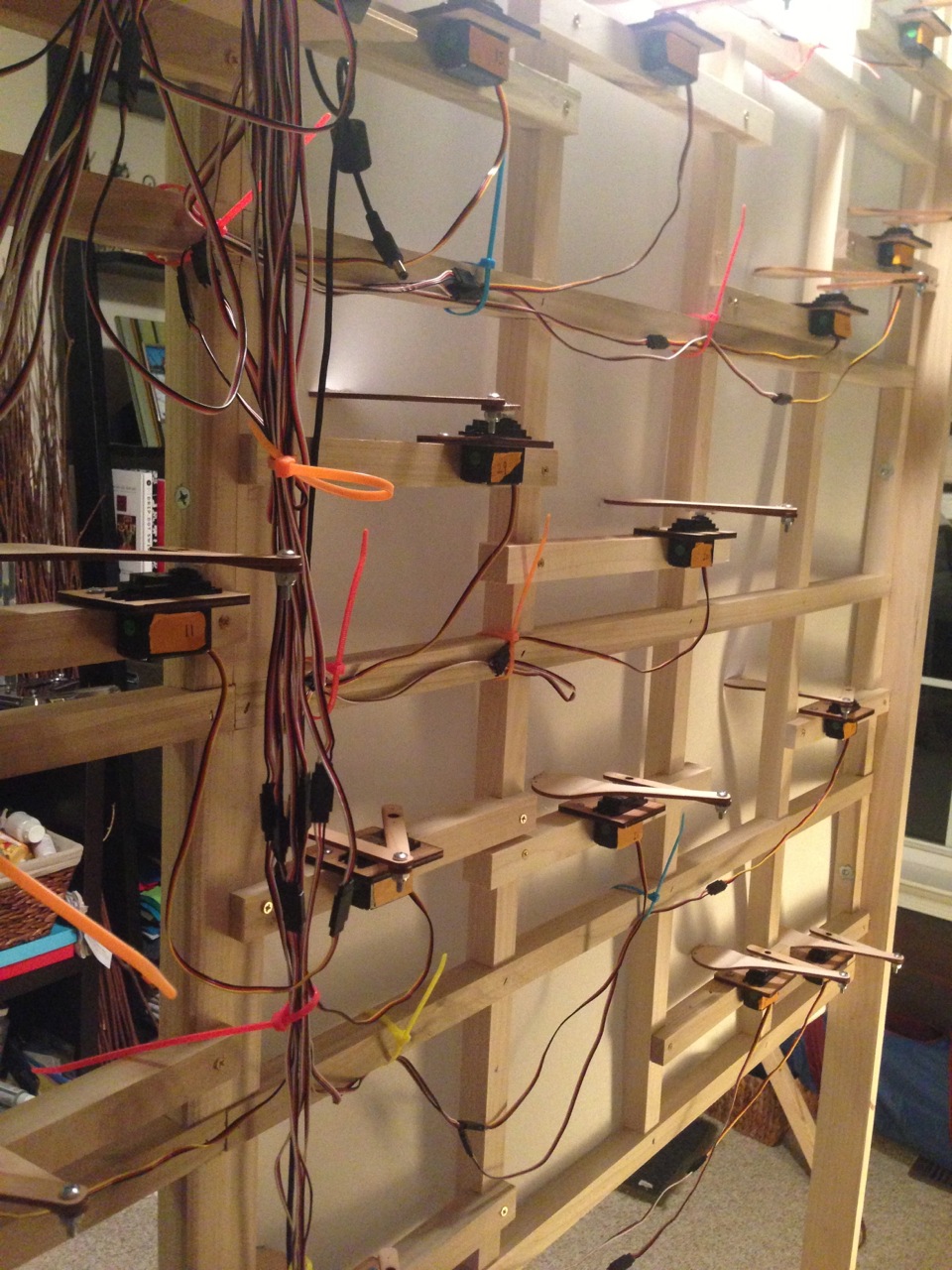
Frame is built, servos are installed, and working fairly reliably, the next step is the projection screen. Based on my prototype, I knew the best material was a sheet of spandex, connected at various places along the frame (connecting at every intersection in the frame makes the motion too robotic, but no connection at intersections makes the whole piece ripple in an unpleasant way).

Now for the time-consuming part, the foam board surface attached to the spandex. Below is the progression of the assembly, one photo shows Tofu (the cat) who was fascinated by the entire progress.








The photos may look like this process happened quickly, but it was very time-consuming. At each step along the way I would test the movement with the servos to make sure the surface moved as expected (and other areas weren’t disrupted).